| Retorno(s) do Pulso LASER | Intensidade do Pulso LASER | Densidade da Nuvem de Pontos LiDAR |
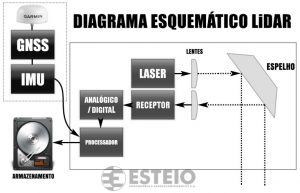
Os Perfiladores a LASER são tipicamente construídos a partir da montagem de uma série de componentes: um sistema de transmissor e receptor de pulsos LASER, um conjunto ótico para direcionar os pulsos de laser, e um sistema de orientação posicional para registrar a origem do pulso laser. Quando utilizado em aeronaves, tal sistema é também referido como LiDAR de Modo Linear ou LiDAR pulsado.
O princípio básico de funcionamento consiste em um sistema que emite uma grande quantidade de pulsos LASER direcionados para o terreno através de uma abertura no fundo de uma aeronave ou de um pod lateral em um helicóptero. No caso das aeronaves, esta abertura é a mesma utilizada em aeronaves preparadas para execução de coberturas aéreas.

Um LiDAR pulsado consome energia relativamente elevada em cada pulso de LASER emitido. Cada pulso parte do sistema instalado na aeronave até atingir a superfície ou objetos no terreno, de onde é refletido, retornando ao sistema. Quanto maior a energia por pulso ou menor a distância do sistema ao terreno, um retorno mais forte de luz pode ser registrado porque mais fótons são refletidos pelo terreno abaixo da aeronave.
Existem vários modelos de equipamentos no mercado com frequência de operação variando de 150 kHz até mais de 1 MHz. Cada um destes equipamentos tem características de uso distintas além de aspectos construtivos e de operação específicos de cada fabricante ou desenvolvedor.
Durante a operação, é comum que o sistema emita pulsos que são dirigidos ao terreno por espelhos móveis ou giratórios. Os pulsos refletidos no terreno são coletados pelo receptor e são convertidos de sinal ótico (analógico) para eletrônico (digital). O tempo gasto para cada pulso emitido pelo receptor chegar ao objeto ou terreno e ser refletido é medido e, baseado na velocidade conhecida da luz, a distância do sensor até este objeto ou terreno é calculada.
A varredura do terreno é feita no sentido transversal à direção de voo com um ângulo de abertura especificado pelo planejamento da operação. Este ângulo de abertura permite a determinação da largura de faixa coberta, enquanto o movimento da aeronave permite a varredura na direção de voo. A altura de voo é determinante para a qualidade e quantidade de pulsos que retornam ao sistema, assim como, a densidade de pontos é influenciada pela largura de varredura quando considerada em conjunto com o ângulo de abertura.

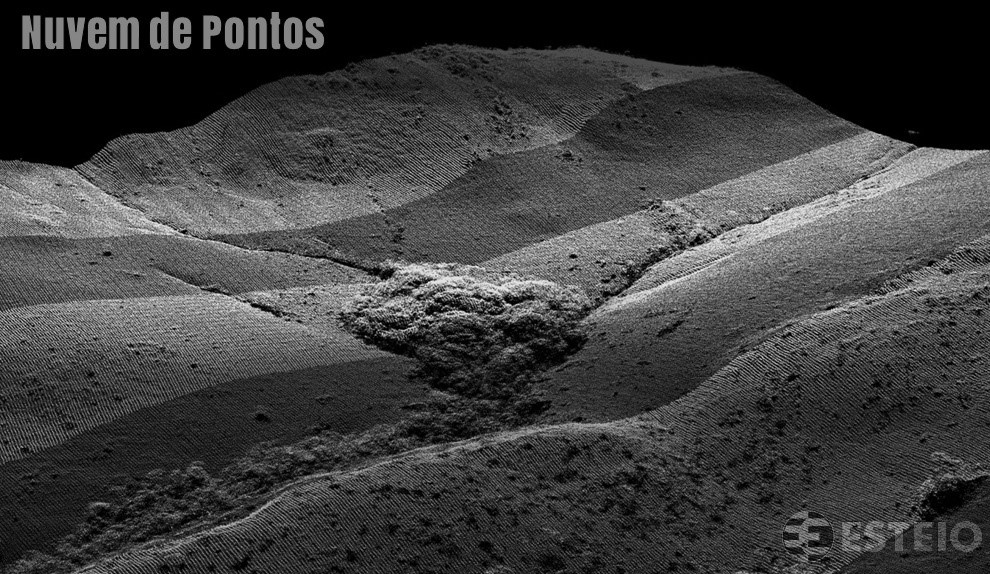
Durante o levantamento LiDAR, é criada a chamada nuvem de pontos bruta que consiste em vários milhões de pontos capturados durante o voo (com suas respectivas coordenadas XYZ e outros atributos pertinentes).
A qualidade de um levantamento LiDAR é também dependente do Sistema de Navegação Inercial (INS) que é formado por giroscópios e acelerômetros para registro dos movimentos (inclinação e rotação) da aeronave no instante da emissão do pulso. Para determinadas alturas de voo, esta qualidade do referencial inercial influencia de maneira significativa a qualidade dos pontos processados.
Faz parte do conjunto operativo, um receptor de GNSS na aeronave que registra a posição do sistema a intervalos fixos. Outro receptor baseado no terreno provê a correção de diferencial para uma determinação final de posição mais precisa.
Por meio de pós-processamento, as medidas LASER com seus respectivos ângulos, os dados de GNSS e dados de navegação inercial são combinados para determinar a posição final dos pontos varridos na superfície terrestre, criando a nuvem de pontos LiDAR.
Em geral, os sistemas LIDAR operam com comprimentos de onda de 1.040 a 1.060 ηm (alguns fabricantes usam o comprimento de onda de 1.550 ηm) que corresponde a parte do espectro eletromagnético próximo do infravermelho quando se trata de mapeamento do terreno. O LiDAR Batimétrico usa o comprimento de onda de 532 ηm, chamado LASER verde, pela sua capacidade de penetração na água.