| Frequência de Operação | Retornos e Classificação do Pulso LASER | Waveform | LiDAR Mulispectral | Pulsos Múltiplos no Ar | Photon-LiDAR |
Os primeiros equipamentos de LiDAR de pulso detectavam o primeiro retorno de pulso LASER refletido nos objetos ou na superfície da terreno, mesmo que o sinal continuasse se propagando e atingindo outros elementos em sua trajetória.
Na área florestal, que foi uma importante área de aplicação do LiDAR no início de sua aceitação pelo mercado, os técnicos envolvidos perceberam que seria adequado que não apenas a reflexão sobre o dossel (primeiro retorno), mas também o terreno abaixo da vegetação pudesse ser capturado para criar um modelo de terreno.
Com o desenvolvimento da tecnologia, os fabricantes capacitaram os sistemas LiDAR para registro do último retorno de um pulso LASER uma vez que este pulso é estratificado ao tocar parcialmente os objetos ou estruturas acima do terreno. E assim por diante, onde os sistemas atuais permitem capturar de 4 a 8 retornos do pulso.
Os múltiplos retornos são parte integrante do processo de classificação dos pontos LiDAR Este é o primeiro passo da cadeia de processamento de dados LiDAR e deve ser tratado de maneira adequada, uma vez que a modelagem 3D urbana, a extração de feições a modelagem de terreno, usam diretamente a nuvem de pontos classificada.
Os diferentes métodos de classificação podem ser encontrados em vários de trabalho de pesquisa. As possibilidades de classificação baseadas em dados originais da nuvem de pontos LiDAR são investigadas para obter classes de estratificação cada vez mais precisas.
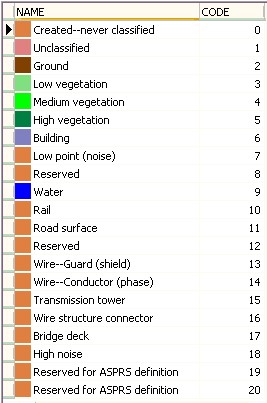
Na classificação de dados brutos do LiDAR, cada ponto tem a atribuição de uma classe de objeto por nomenclatura padronizada de acordo com as diretrizes para o formato LAS (formato padronizado de armazenamento de nuvem de pontos LiDAR), usando propriedades de dados LiDAR como os retornos múltiplos, elevações, intensidade, posição dos pulsos vizinhos, ângulo do pulso LASER, etc.
A classificação pode ser uma operação de processamento intensivo e muitos conjuntos de dados LIDAR passam por uma classificação rápida e limitada. A classe Ground (terreno) é sempre incluída em um arquivo classificado no formato LAS, pois é indispensável para criar um modelo digital de terreno a partir da nuvem de pontos.
As versões de categorização d nuvem de pontos LiDAR comumente usadas do formato LAS (1.2 e 1.3) têm 8 categorias de classificação pré-definidas, suportando um máximo de até 32. A versão 1.4 do formato LAS tem cerca de 20 classes pré-definidas e pode manipular até 256 classes.